На Тайване создали систему организации взаимодействия роботов-манипуляторов
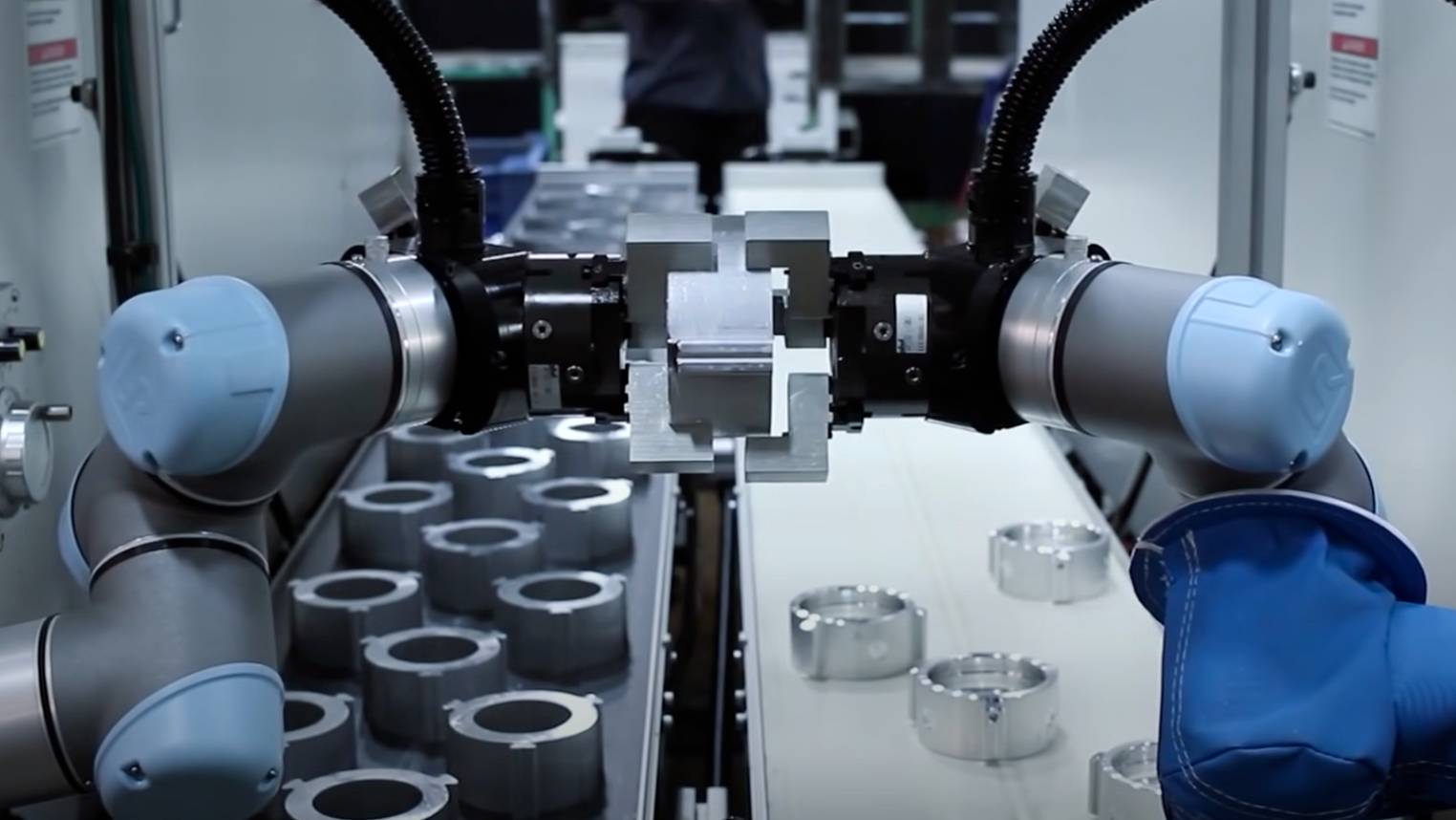
Программно-аппаратный комплекс управления взаимодействием нескольких роботов-манипуляторов на основе объемного компьютерного зрения разработала тайваньская компания Solomon Technology, 30 декабря сообщает тайваньское издание об информационных технологиях и электронике DigiTimes.
Система позволяет построить отличную от обычно применяемой схемы взаимодействия нескольких роботов-манипуляторов. Обычно движения манипуляторов заранее запрограммированы так, что они помогают, а не мешает друг другу.
Новая систем предполагает отдельную систему контроля манипуляторов, которая анализирует данные с объемного изображения с использованием искусственного интеллекта (ИИ) и применяет результаты анализа для выбора оптимальных траекторий движения роботов в рамках их рабочих заданий, сообщил председатель компании Джонни Чен. Это особенно важно при взаимодействии множества манипуляторов, добавил он.
Такой подход позволяет добиться более гибкой и быстрой настройки взаимодействия роботов. Вместе с тем, интеллектуальная технология позволяет добиться оптимальной скорости движения манипуляторов так, чтобы они не мешали друг другу.
Solomon Technology является поставщиком коллаборативных роботов Universal Robots. Они применяются в обрабатывающей промышленности, при монтаже электроники, сборке конструкций и других отраслях.